卷积双目匹配
双目立体系统中,匹配算法是必不可少的一个环节,但是当今的双目匹配算法效率并不是非常的理想,我在原有的匹配算法中改进了一种算法,并这种算法甚至可以自成一套体系,我称它为卷积双目匹配。
接下来我会介绍我的算法原理,我的算法步骤主要分成以下几步:
- 图像相对滑动
- 图像整体差值
- 通过卷积来计算损失矩阵
- 从损失矩阵中查找最合适的视差值
我会使用下面的两幅图片来进行分析:


两张图片的特点
当左右摆放的相机时,同一个物体在两张图片上的位置会有一个特点:右图片的物体会普遍靠左,左图片物体会靠右。这个现象很容易说明,左相机会照的左面东西多一点,右相机会照右边多一点。
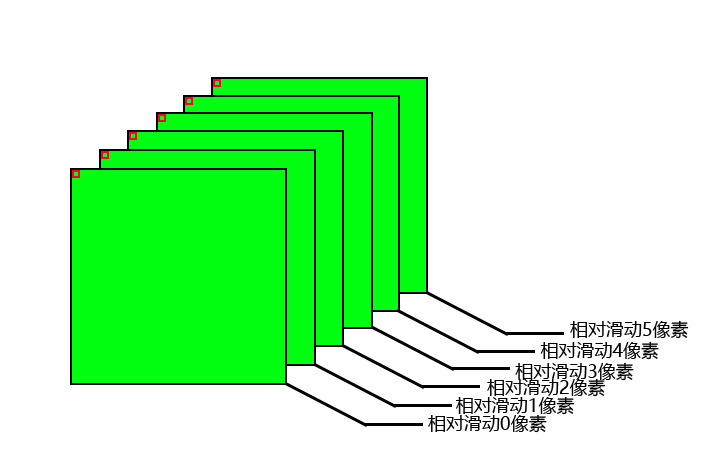
例如,下图中红色矩形标记的桌角,左图桌角的坐标为(200,190),右图桌角的坐标为(167,190),两张图片的桌角的行坐标为是相同的,都是第190行,但列坐标就不同了,而且左图的列坐标为第200列,右图的列坐标为第167列,很明显左图中桌角和右图中桌角相比较更偏右一点。
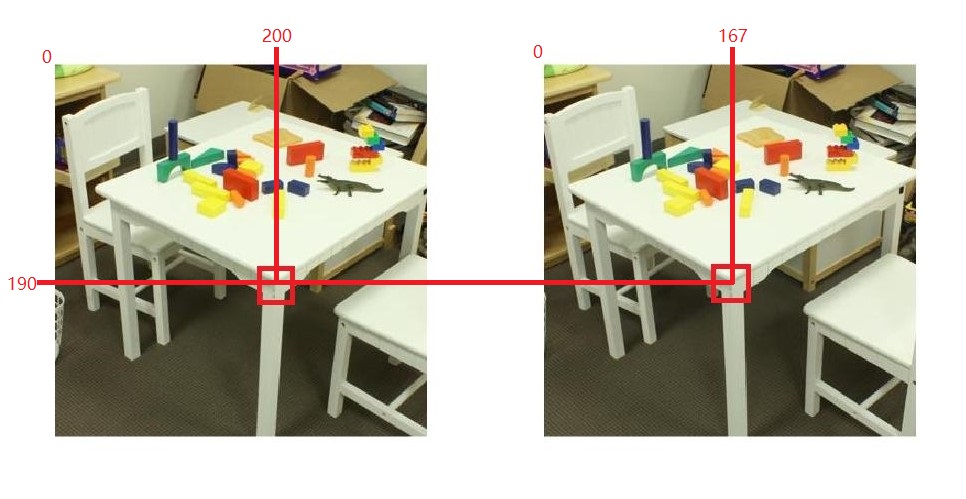
这个特点会体现在两张图片中所有的物体上,而且,如果这个物体非常靠近相机,这种特点就越明显。在接下来的过程中我会用到这个特点进行处理。
图像相对滑动
利用以上两张图片的特点,我们可以得出一个结论:如果两张图都有一个物体,按照左图这个物体坐标的位置,在右图的这个位置向右寻找,一定能找到左图中相同的物体。
这样就可以建立一个新的方法匹配这些相同的地方。如图所示,先将两张图片完整重叠在一起,然后让右图片进行向右滑动,在滑动的过程中,一定会有一些物体会大概重合,就例如图中桌角的情况。
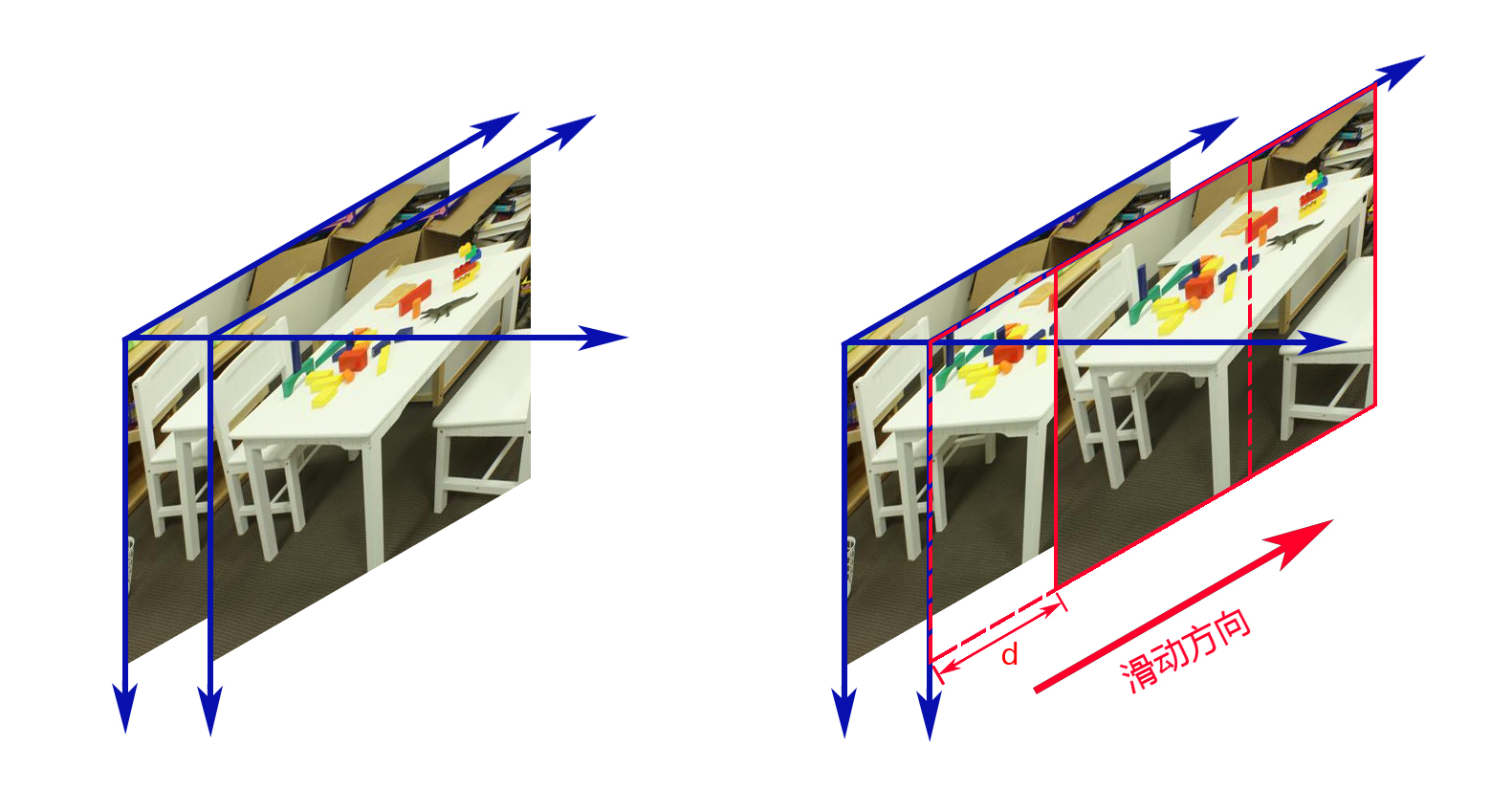
每滑动一次就是移动了一个像素,当滑动了$d$个像素,让一个物体部分区域重合的时候,我们可以认为$d$就是当前像素的视差。
但两张图片不会一直滑动下去,因为没必要,视差值会小于等于整张图片宽度,而等于的情况几乎没有可能,因为一旦等于就意味着物体太靠近相机,导致出现拍摄不全的情况,所以在滑动的时候确定需要滑动多少,太小的话会影响较大的视差部分,太大会加大计算负担,整体时间会增加。我所选的这两张图我预设50次滑动。
图像整体差值
大概的方法已经确定下来了,但现在的问题是如何能确定是否某个区域图片已经重合,这里我是使用了减法操作。
两张图片由于相对滑动,所以可以将重合部分进行相减,而在写程序的时候,可以将左图片的“头部”和右图片的“尾部”去掉就可以保证剩下了重合部分,如图所示。
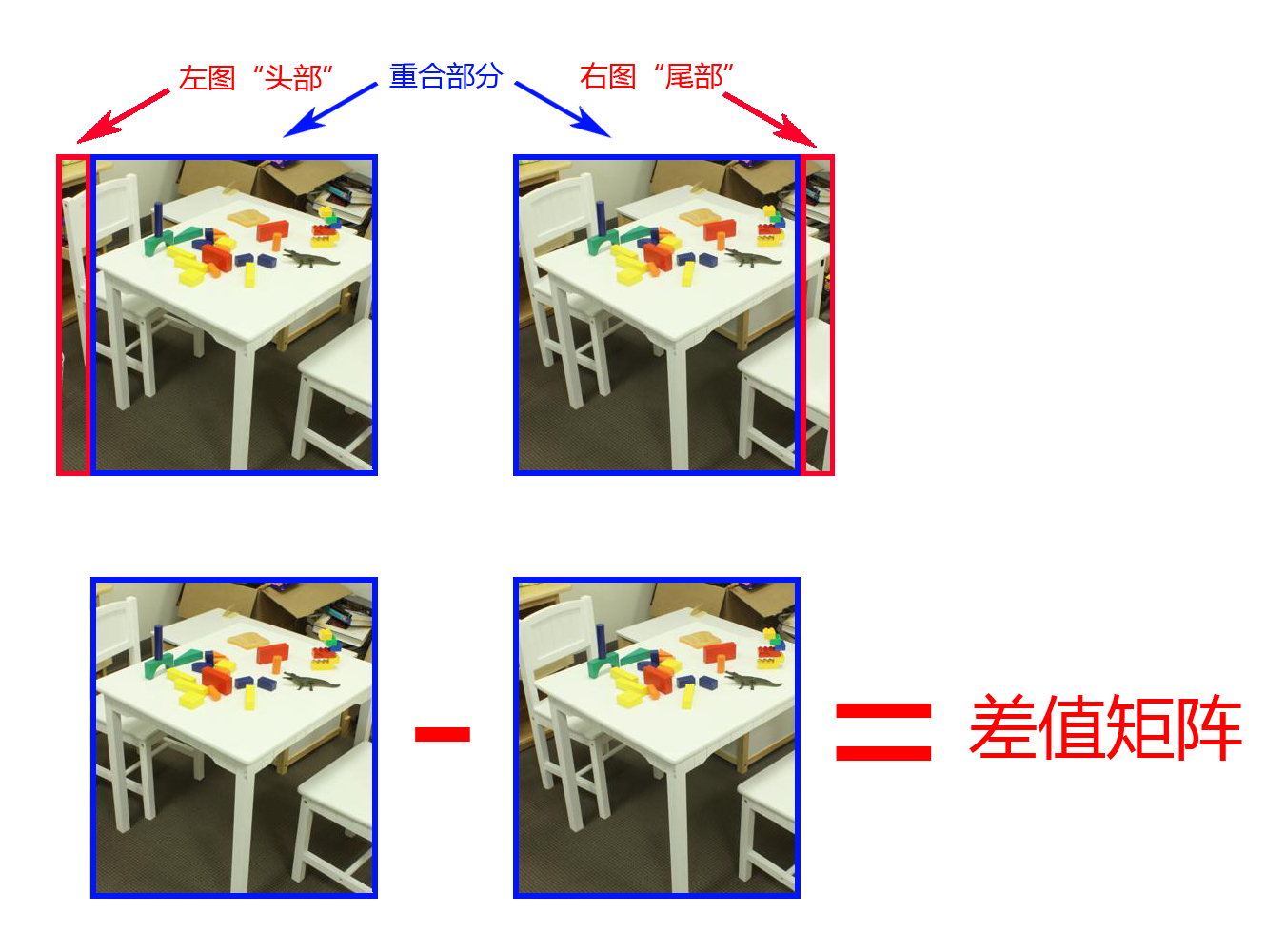
在两张图片重叠的部分进行相减,会得到一个差值矩阵,当两个区域像素值非常接近的时候,进行减法后得到的数值的绝对值会非常的小,因此通过这个矩阵可以观察出,当前滑动$d$像素下哪些区域非常的接近。
例如,下图是一个模拟出的差值矩阵,若将区域设置成$5*5$,为了进一步比较,将区域A和区域B的数据累加在一起,A区域的累加为24,B区域累加为488,这样说明A区域比较接近,B区域就不太接近,所以A区域更适合当前的视差值$d$(滑动的像素值)。
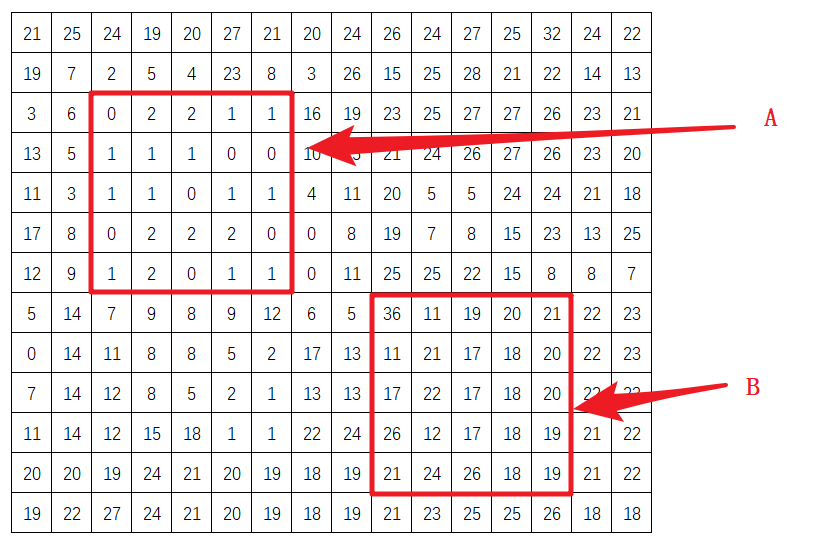
所以每次滑动图片,需要计算差值矩阵,差值矩阵计算完后,需要划分区域,每个区域的元素需要累加在一起得到一个值,由于一整张图片会有很多区域,每个区域可以排布成一个新的矩阵,暂时称之为损失矩阵。
python程序
- 裁剪图片函数
1 | # 裁剪图片函数 |
- 计算一次差值矩阵
1 | # 计算一次差值矩阵 |
通过卷积来计算损失矩阵
卷积运算在信号中非常常用,同时在图像处理中也有很重要作用。卷积运算需要一个 2 维数据和一个卷积核进行运算。
卷积为如下过程:卷积核旋转180度,但在大多情况下,卷积核是中心对称结构,所以卷积核旋转180度不会影响最后结果。卷积核相当于一个权重的集合,将卷积核在 一个2 维输入数据上进行滑动,根据对准的位置求出所有的加权和,如图所示为其中一种滑动情况。
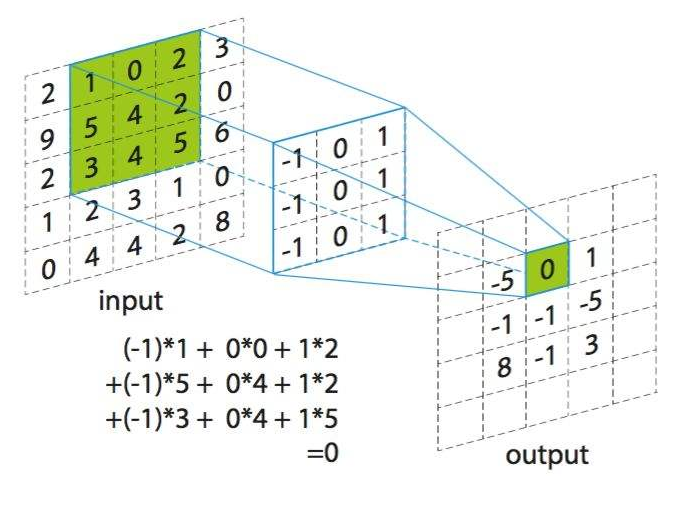
下图为卷积运算的全过程。
不同的卷积核会产生不同的效果,在这里就不过多介绍卷积核的类型,接下来用到的卷积核是全1矩阵。
这种全是1的矩阵可以将每个区域的所有元素进行累加,这正符合目前的需求,每一次滑动可以说是一次计算当前区域的损失值,只需要一个卷积计算就可以直接出所有区域的损失值,。
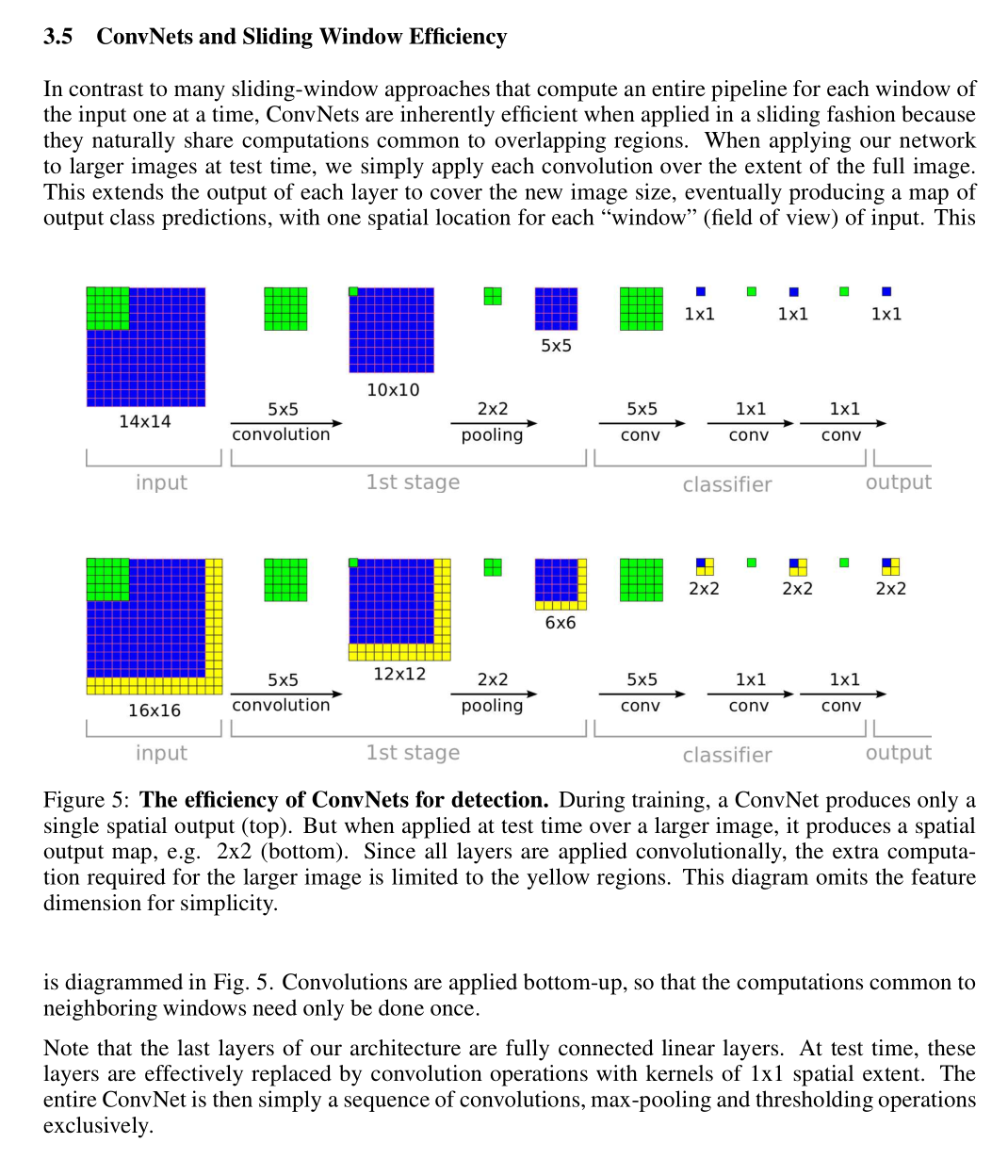
这里巧妙利用了卷积的特点,灵感来自于一款卷积神经网络的论文,详细内容直接看我所提供的链接:
OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks
当然也可以看下面这张图,那篇文章中对我比较重要的部分。
由于每次图片相对滑动都可以获得一个差值矩阵,所以经过卷积后,同样还可以获得一个损失矩阵,由于我预设了50次滑动,所以会得到50个损失矩阵。
python程序
- 计算损失矩阵
1 | def makeImageCost(image_right, image_left, step, core_size): |
从损失矩阵中查找最合适的视差值
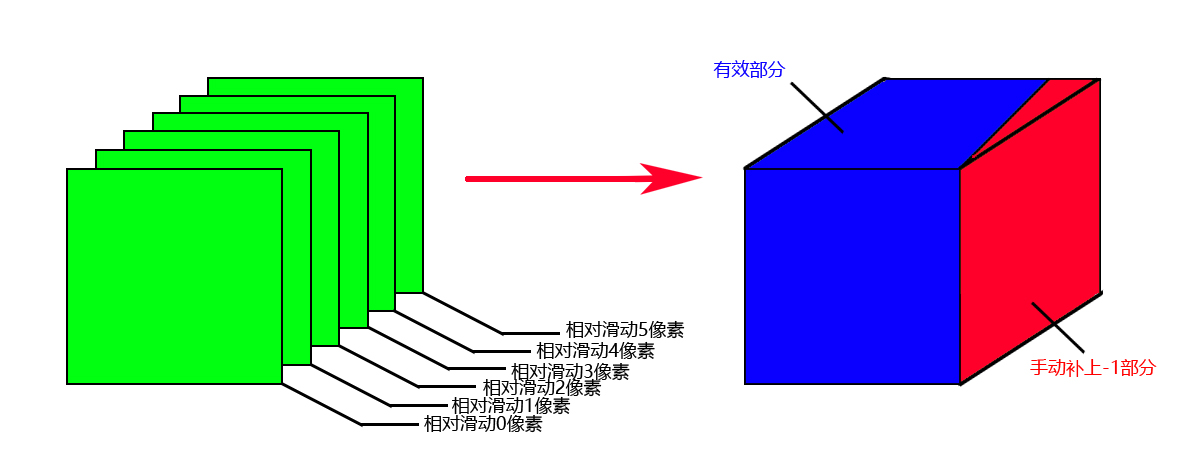
目前为止,根据图片滑动50次,已经计算出了50个损失矩阵,但由于相对滑动,重叠的部分越来越小,50个矩阵的宽度并不相同,只有矩阵的行数相同。为了保持所有的损失矩阵宽度相同,需要把矩阵缺失的部分手动补上。由此可见补上的部分会越来越大,补上的部分每次都会增加一个像素宽度,直到滑动结束。
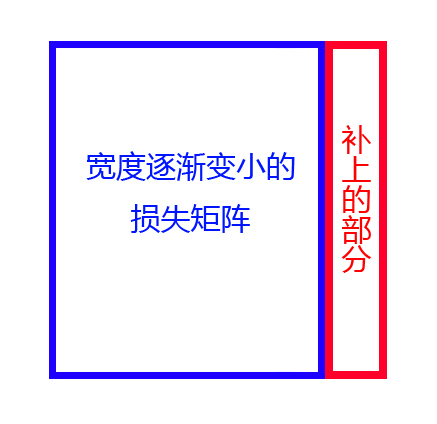
损失矩阵有个特点,由于卷积前所有值取绝对值,即使经过卷积,所有的值都是正数,为了方便区分补上的部分,补上的值可以使用-1,这样可以保证正数部分是有效的损失。
有了50个相同大小的矩阵后,将它们排列起来,没有滑动的损失矩阵放在最前面,接着后面是滑动1个像素的损失矩阵,以此类推,滑动第49个像素的损失矩阵放在最后,这就形成了一个立方体的三维矩阵。
现在就可以检查同50个损失矩阵中的相同位置的大小,其本质是比较一个三维矩阵的第三个维度上的的最小值,在最小值所处的滑动次数,就是该像素的视差值。
例如,如图所示,比较50个损失矩阵最左上角的大小,假设第3个损失矩阵(滑动3像素)的左上角值最小,左上角的视差值为3。
由于之前做过添加-1的处理,所以写程序的时候结合-1的特殊,可以跳过-1的部分,直接找出非负数中最小的值。
通过查找所有损失矩阵最小的损失之后会形成一张新的图,该图为最终视差图。

python程序
- 补上损失矩阵缺失部分
1 | # 补上损失矩阵缺失部分 |
- 计算视差图
1 | # 计算视差图 |
- 剩下的程序
1 | # 用opencv显示图片 |
 微信
微信 支付宝
支付宝